Enseñarán a robots cómo caminar con software
Prefieren aprendizaje empírico a modelaje manual
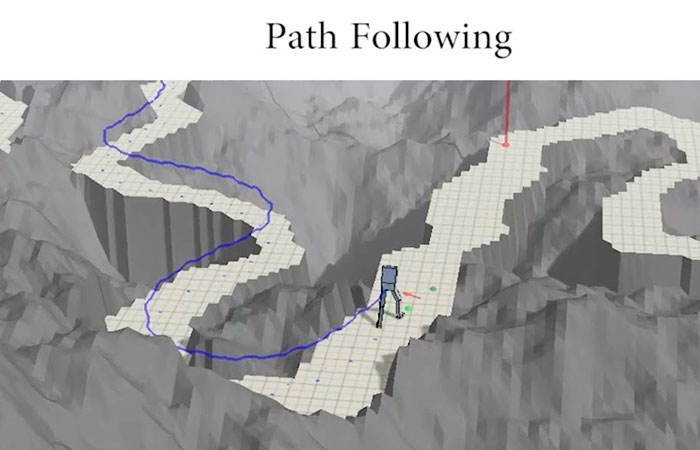
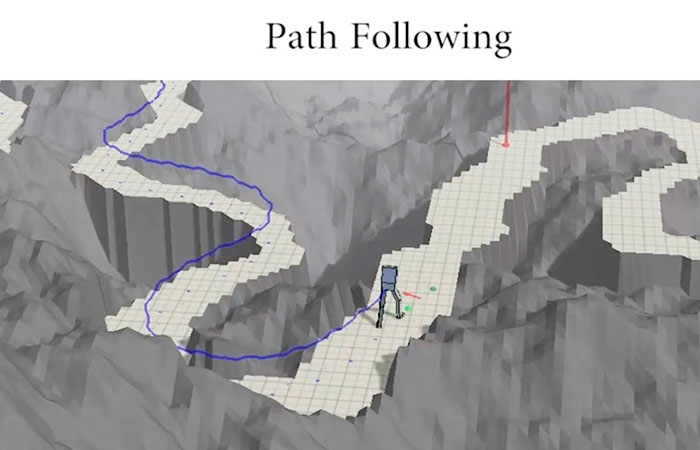
Michael van de Panne, profesor de Ciencias de la Computación en la Universidad de Colombia, presentó durante el evento SIGGRAPH 2017 su proyecto DeepLoco, con el cual proponeenseñarle a robots cómo caminar con software. Con esta innovación, el experto en algoritmos de aprendizaje pretende que el proceso de la "caminata mecánica" se vuelva mucho más integral y orgánico.
De acuerdo a su presentación, su software permite poner a personajes animados (o representaciones digitales de robots físicos) en entornos donde repita una y otra vez la tarea de caminar por un sendero determinado. De esta forma, a través de prueba y error, las máquinas podrán aprender cómo moverse correctamente, sin la necesidad de programar estos comportamientos manualmente.
Automatización de Procesos





 La escasez de donantes complica el acceso a trasplantes en México
La escasez de donantes complica el acceso a trasplantes en México Un estudio revela la relación entre la depresión y el deseo de alimentos dulces
Un estudio revela la relación entre la depresión y el deseo de alimentos dulces China presenta Manus, el primer agente de inteligencia artificial realmente autónomo
China presenta Manus, el primer agente de inteligencia artificial realmente autónomo Un estudio revela cómo mejorar la resistencia a la desinformación en línea
Un estudio revela cómo mejorar la resistencia a la desinformación en línea